May 11, 2024
Professor Burke to offer Unmanned Aerial Vehicles hands on course in Fall 2024: “Drones”

EECS Special Topics Course Fall 2024
Unmanned Aerial Vehicles (UAVs): Drones
Professor & Class Schedule
Peter Burke
e-mail: pburke@uci.edu
Lecture M/W 1-2:30 or equivalent
Lab: business hours
TA:
TBD
Textbook:
Professor will provide online learning materials
Enrollment/prerequisites:
Enrollment is open to all undergraduate and graduate students at UCI. There is no prerequisite.
Grading Components:
P/F: Successful demonstration of drone flight with GPS, OSD, flight mode changes, telemetry
Course overview
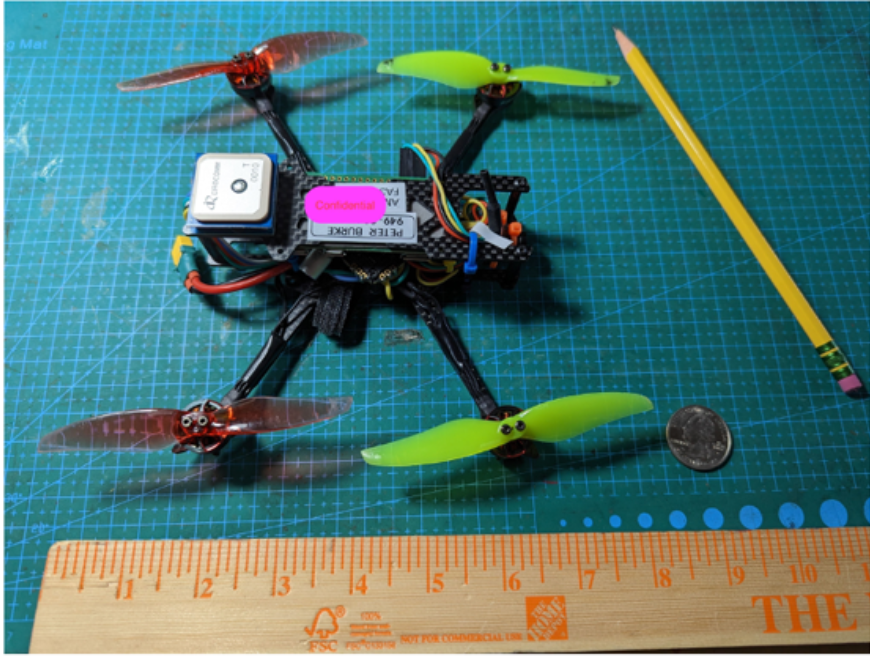
This will be a theory and hands on tutorial about how to build and fly drones/unmanned aerial vehicles from start to finish. It will cover all aspects including drone avionics, batteries, power, motors, airframes. At the end of the course students will have built and flown their own drone. The drone parts will be provided by the department and each week students will install a new component after a theory lecture on its operation. The drone will use Ardupilot (open source software already installed on over 1 million vehicles), and will be fully capable of autonomous, GPS guided way point missions, and will have wireless telemetry to a ground control station. Students will be expected to demonstrate fully flight capabilities for achieving a passing grade. The students will be expected to pass a short online FAA exam and follow all FAA and UC drone policies during the course.
The design is here: https://rotorbuilds.com/build/31747
Course Outline/topics
Week 1: Safety, FAA, UC regulations
Week 2: Flight controllers (overview of the brain of the drone; firmware programming and demonstration on actual hardware) Barometer, Micro controller, UART, PWM and other modulation techniques
Week 3: Radio control. Protocols, theory of RF remote control. Firmware installation and programming of radio receiver on drone and radio transmitter on the ground (using ESP32 ExpressLRS open protocol). Aleron, elevator, throttle, rudder, flight mode selection, arm/disarm, fail safe (lost link) behavior.
Week 4: Power, batteries, ESCS. Battery technology, safety, charging, storage, handling. Brushless motor function and electronic control with electronic speed controllers.
Week 5: GPS + other positions aids (LIDAR, sonar, optical flow, etc): Theory of operation, accuracy. Connect and demonstrate GPS coordinates on flight controller.
Week 6: Video and heads up display. Analog and digitial protocols. Install camera on drone with video transmitter, program heads up display overlay (GPS, speed, alt, etc). Demonstrate receive with video monitor.
Week 7: Flight modes, maiden flight in drone cage in manual flight mode.
Week 8: Telemetry to ground: RF modem, wifi, 4G /cell phone, Crossfire, etc. Demonstration with ESP32 based wifi transponder using DroneBridge. Ground control stations.
Week 9: Flight modes and autonomous missions. Waypoint missions. Auto-takeoff/autoland.
Week 10: Remote ID, Unmanned Traffic Management (UTM), network/cloud integration of drones, drone swarms. (Students will install a remote ID module on their drones this week).
Week 11: Final project due: Flight demonstration
Posted in Group News