EECS Special Topics Course Fall 2024
Unmanned Aerial Vehicles (UAVs): Drones
Professor & Class Schedule
Peter Burke
e-mail: pburke@uci.edu
Lecture M/W 1-2:30 or equivalent
Lab: business hours
TA:
TBD
Textbook:
Professor will provide online learning materials
Enrollment/prerequisites:
Enrollment is open to all undergraduate and graduate students at UCI. There is no prerequisite.
Grading Components:
P/F: Successful demonstration of drone flight with GPS, OSD, flight mode changes, telemetry
Course overview
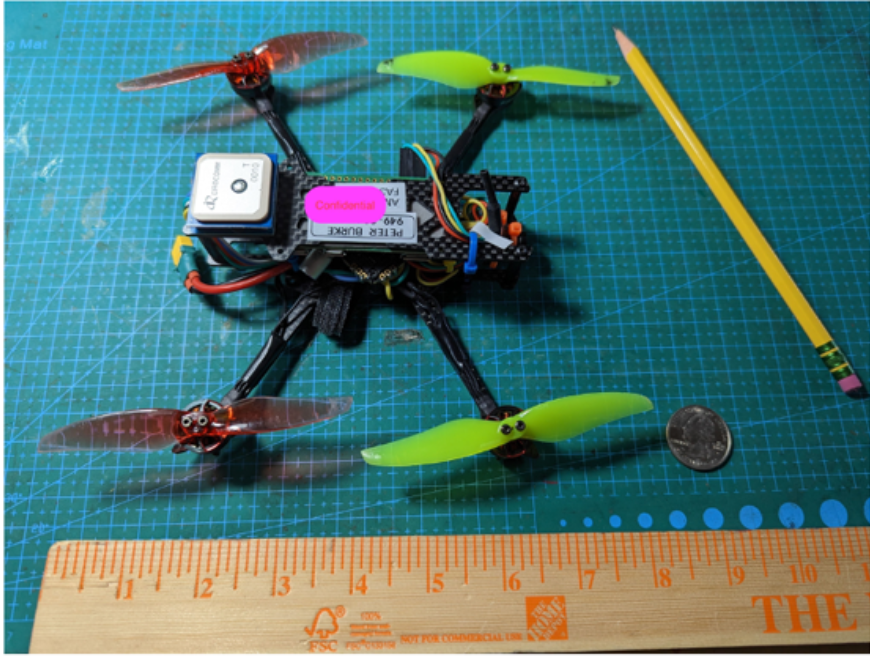
This will be a theory and hands on tutorial about how to build and fly drones/unmanned aerial vehicles from start to finish. It will cover all aspects including drone avionics, batteries, power, motors, airframes. At the end of the course students will have built and flown their own drone. The drone parts will be provided by the department and each week students will install a new component after a theory lecture on its operation. The drone will use Ardupilot (open source software already installed on over 1 million vehicles), and will be fully capable of autonomous, GPS guided way point missions, and will have wireless telemetry to a ground control station. Students will be expected to demonstrate fully flight capabilities for achieving a passing grade. The students will be expected to pass a short online FAA exam and follow all FAA and UC drone policies during the course.
The design is here: https://rotorbuilds.com/build/31747
Course Outline/topics
Week 1: Safety, FAA, UC regulations
Week 2: Flight controllers (overview of the brain of the drone; firmware programming and demonstration on actual hardware) Barometer, Micro controller, UART, PWM and other modulation techniques
Week 3: Radio control. Protocols, theory of RF remote control. Firmware installation and programming of radio receiver on drone and radio transmitter on the ground (using ESP32 ExpressLRS open protocol). Aleron, elevator, throttle, rudder, flight mode selection, arm/disarm, fail safe (lost link) behavior.
Week 4: Power, batteries, ESCS. Battery technology, safety, charging, storage, handling. Brushless motor function and electronic control with electronic speed controllers.
Week 5: GPS + other positions aids (LIDAR, sonar, optical flow, etc): Theory of operation, accuracy. Connect and demonstrate GPS coordinates on flight controller.
Week 6: Video and heads up display. Analog and digitial protocols. Install camera on drone with video transmitter, program heads up display overlay (GPS, speed, alt, etc). Demonstrate receive with video monitor.
Week 7: Flight modes, maiden flight in drone cage in manual flight mode.
Week 8: Telemetry to ground: RF modem, wifi, 4G /cell phone, Crossfire, etc. Demonstration with ESP32 based wifi transponder using DroneBridge. Ground control stations.
Week 9: Flight modes and autonomous missions. Waypoint missions. Auto-takeoff/autoland.
Week 10: Remote ID, Unmanned Traffic Management (UTM), network/cloud integration of drones, drone swarms. (Students will install a remote ID module on their drones this week).
Week 11: Final project due: Flight demonstration
After a long hiatus, UAVS@UCI is active again on Saturday afternoons at the ARC, with full university and FAA approval.
Contact Professor Burke via email for details if you want to join us on Saturdays!
Club website:
https://campusgroups.uci.edu/uavs/home/


Peter Burke received a new $160,000 Research Grant from AFOSR.
“Optical and RF time domain system for quantum spin lifetime and entanglement studies”)
Funding Agency = AFOSR
Grant #FA9550-23-1-0061
BurkeLab was awarded this grant for the purchase of laser and RF pulse systems to enable quantum spin fluorescence lifetime measurement as well as RF pi pulse spin state manipulation in quantum sensors in living cells.
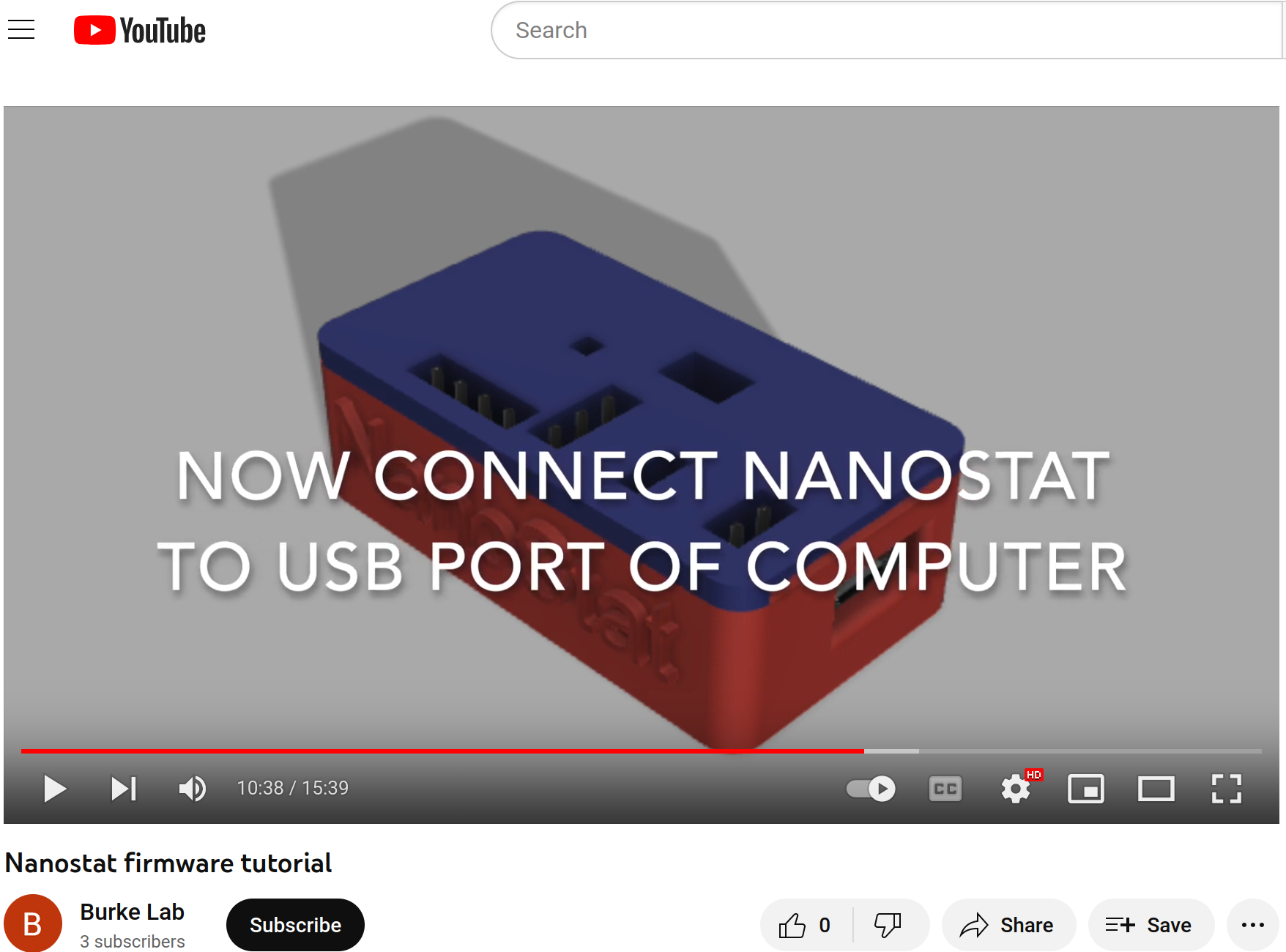
Professor Burke has uploaded a tutorial on how to compile and upload firmware for the Nanostat, an open-source, wireless potentiostat, published in Shawn Chia-Hung Lee, Peter J. Burke “NanoStat: An open source, fully wireless potentiostat” Electrochimica Acta, https://doi.org/10.1016/j.electacta.2… (2022).’
This, with the prior tutorial on PC board design and order, establishes a comprehensive complete example of how to design, build, and deploy an electronic system.
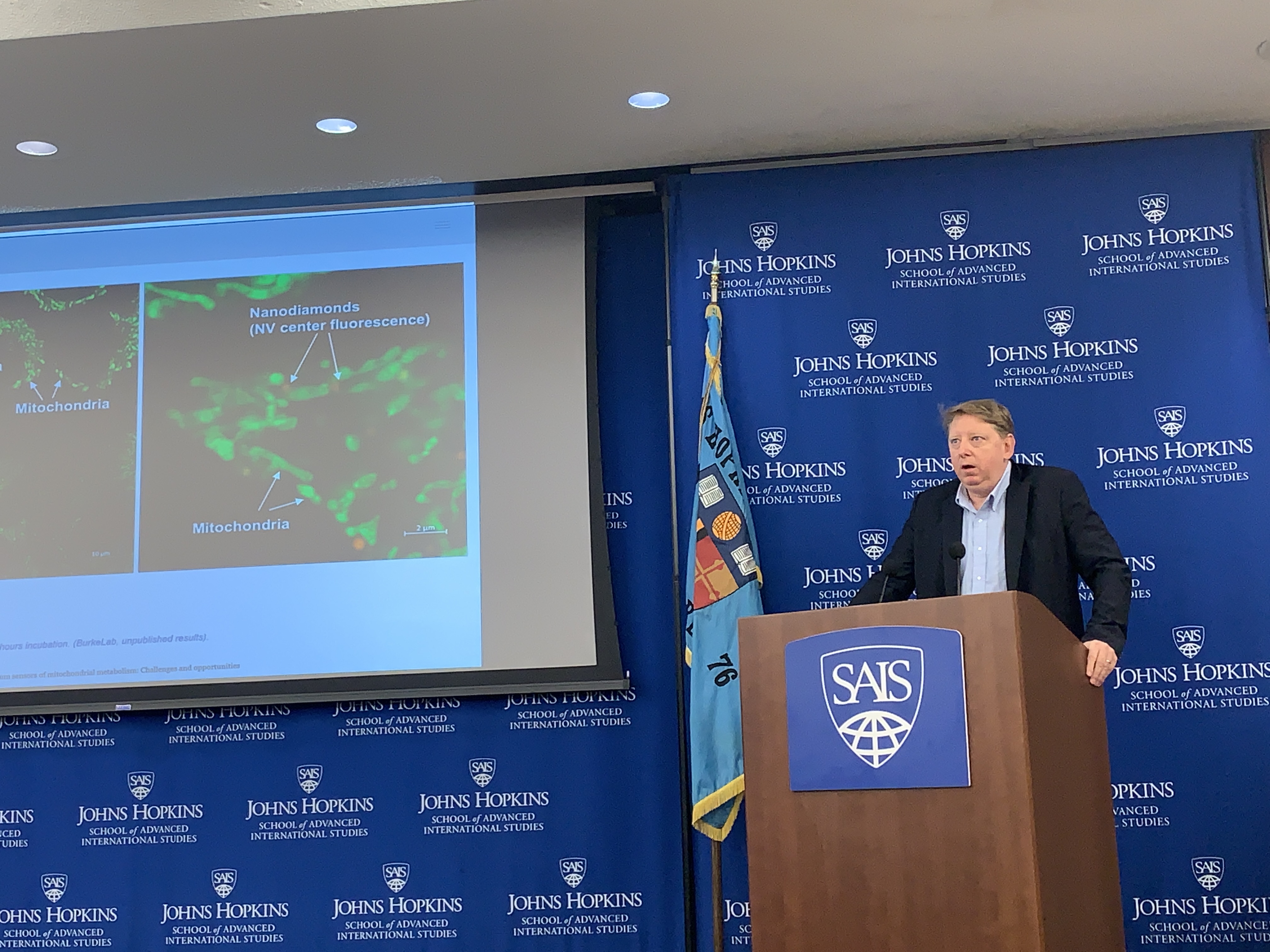
Professor Burke presented at on NSF AFOSR workshop on quantum sensors in biology using qubits of nanodiamonds.
The workshop was held in Washington DC.
“I’m excited about the potential of using qubits to sense biological quantities that cannot be measured classically”, said Prof. Burke. Other experts participated in this invite only workshop bringing together nanodiamond synthesis experts and leading biologists from around the world.
P Burke was awarded the Dean’s Award for Faculty Innovation in Teaching in Spring 2022.
Congratulations Professor Burke!

An international delegation of professors from Lille, France visited BurkeLab this week. Professor Kamel Haddadi and colleague Christoph Loyez esteemed professor at the University of Lille, and IEMN (Institut d’électronique de microélectronique et de nanotechnologie https://www.iemn.fr) visited BurkeLab in January 2022 to discuss scanning microwave microscopy techniques, and their application to live cells.

PhD candidate in BurkeLab Shawn Lee presented his thesis work “Investigation of mitochondria cristae ultrastructure and membrane potential changes using super-resolution Airyscan microscopy” at an Army Research Office online workshop on bioelectricity.
“With our new super resolution microscope, we are able to image the structure of living mitochondria. This will enable new understanding of a topic that BurkeLab first discovered about 5 years ago, that the mitochondria membrane potential is not uniform inside the organelle.”
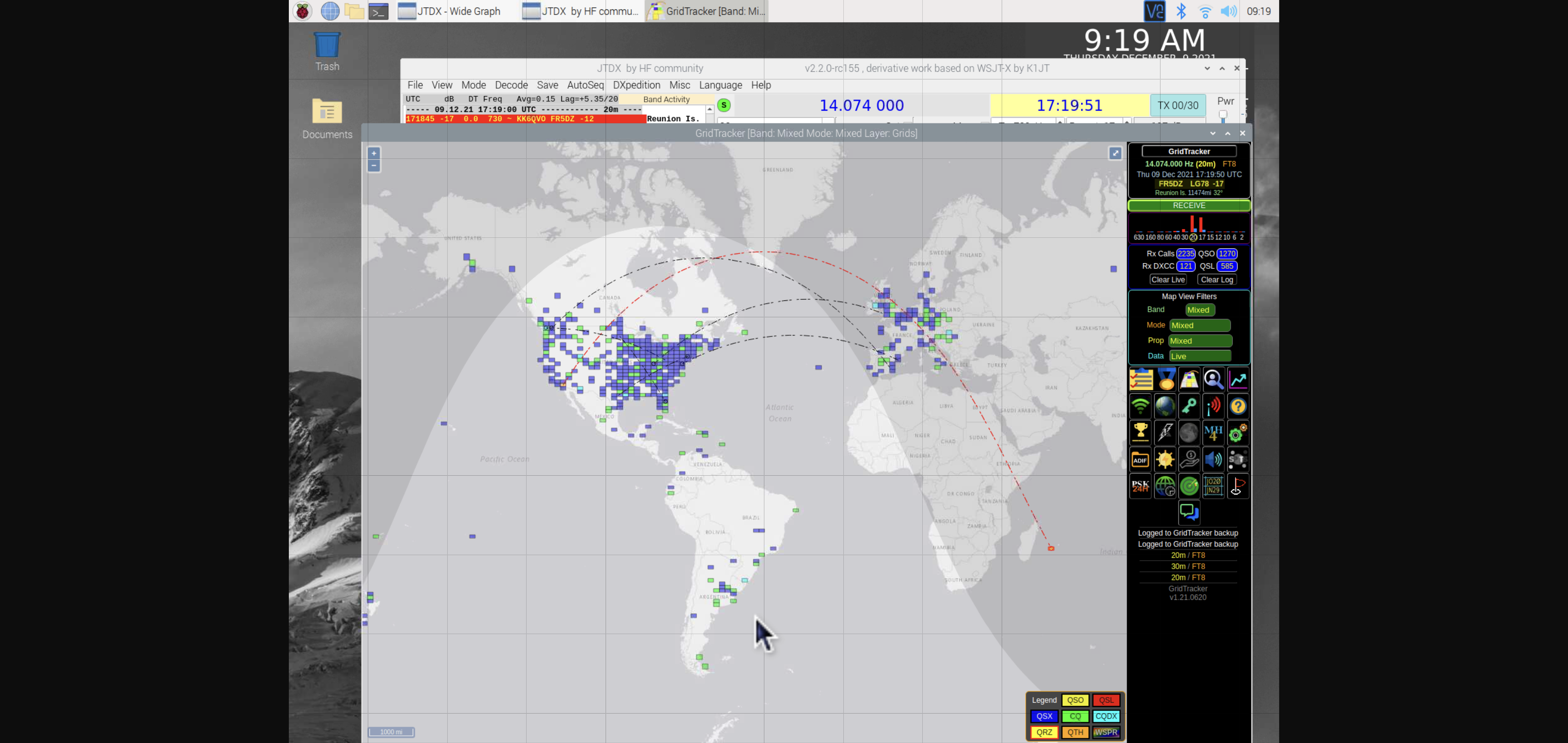
Professor Burke established two-way communication with the remote island of Reunion, off the coast of Madagascar, using FT8 digital communications and bouncing the radio waves (of 20 m wavelength) off the ionosphere. Reunion island is the closest land mass to the antipode of southern California. The antipode is the point on the exact opposite side of the earth.
“With a modest amount of effort, students can participate in these long distance communications, help establish emergency backup systems, and learn to put into practice the theory they learn in the classroom”, said Burke.